AGRICULTURE

Vehicle automation particularly automated truck control is becoming more and more important in today’s rapidly developing world as we move toward the future of transportation.
Peloton Technology recently placed two 18 wheelers equipped with GPS systems and Delphi’s Electronically Scanning RADAR (ESR) provided by AutonomouStuff on a Nevada highway successfully demonstrating that automated systems can help prevent crashes and make vehicles more fuel-efficient.
Safety 
“A human driver takes between one and two seconds to react” said Peloton CEO Josh Switkes. “We can cut that down to almost simultaneous braking between the two trucks.”
Peloton’s cooperative braking prevents frontal collisions by automatically applying the brakes on both trucks – eliminating delays of human perception and reaction time for the following truck which account for over 100ft of distance at highway speeds.
Fuel Savings
Wirelessly linking two trucks saves more than 7% at 65 mph with the front truck saving 4.5% on fuel and the rear truck saving 10%. Annual fuel costs per truck range from $80000 to $100000. The Peloton System for automated truck control offers greater efficiency gains than any other aerodynamic technology for tractor-trailers available providing the industry means to save more than $6Billion of diesel fuel annually.
Data Collection and Monitoring
Peloton-equipped trucks are connected to the cloud. Peloton’s Network Operations Center (NOC) coordinates trucks to find linking partners on the road and enables cross-fleet platooning. Geo-fencing enables trucks to platoon only on safe roads in safe conditions and with safe drivers. The unique data available from the platooning system and its sensors provide powerful contextual analytics to fleet managers such as truck diagnostics event capture driver training and predictive maintenance.
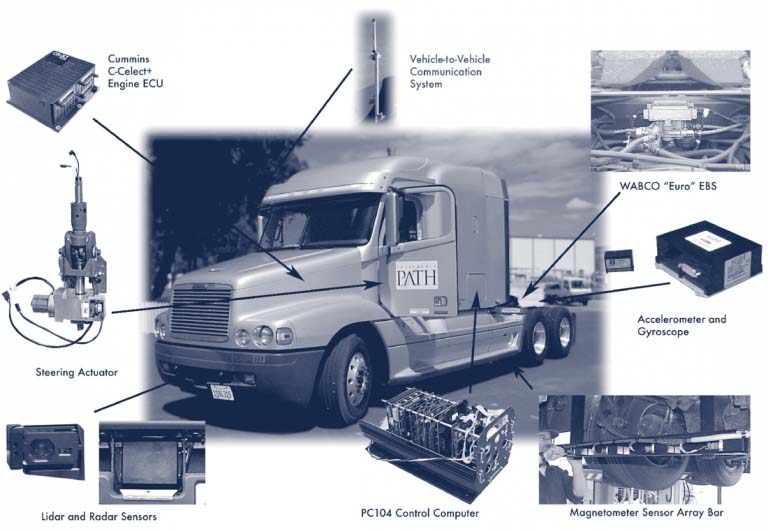
Peloton is an automated vehicle technology company that utilizes vehicle-to-vehicle communications and radar-based active braking systems combined with sophisticated vehicle control algorithms to link pairs of heavy trucks. The safety systems are always active and when the trucks are out on the open road they can form close-formation platoons. The system controls braking and acceleration similar to adaptive cruise control and drivers remain fully engaged and retain steering control. The dramatic reduction in aerodynamic drag in these platoons provides unprecedented fuel economy savings for both the trailing and the leading truck. A real-time video link lets the rear driver see the road ahead of the platoon. The more extensive data flowing from the trucks also allows new levels of diagnostics and prognostics while empowering better drivers and stronger fleet management.
California Partners for Advanced Transportation Technology (PATH) has been instrumental in the development of major transportation innovations such as vehicle automation and IntelliDrive and has produced alumni—both students and faculty—who are transportation leaders and educators around the state the U.S. and the world.
PATH researchers completed testing of an automated platoon of tractor trailer trucks on a remote section of highway in Nevada.
These tests were designed to show that an automated vehicle following in a platoon could be done using automotive RADAR and dedicated short-range communications (DSRC) for vehicle-to-vehicle coordination at its standard update interval and to measure the potential fuel consumption savings associated with aerodynamic drafting.
The truck test scenario consisted of starting up from a stop accelerating to a cruise speed of 87 km/h and then decelerating to a stop at the end of the test section.
The cruise speed level was chosen to avoid complications from inconsistent transmission gear shift speeds among the test trucks when they exceeded this speed a temporary practical constraint rather than an inherent limitation of the general technical approach. The automated truck control testing began at gaps of 10 m between trucks and continued at that gap throughout extensive debugging.
Only after the performance was consistent and reliable at the 10 m gap did the research team attempt shorter gaps. By the end of the three-week test period there was data for the vehicle following at gaps of 8 m and 6 m as well so that a comparison could be made for the fuel consumption savings at these different gaps.
Additional highway-speed testing of the three-truck platoon is planned providing opportunities for testing some shorter gaps as well as operations including speed and grade changes and platoon join and split maneuvers.